

I am an undergraduate student researcher at Northwestern University's Center for Robotics and Biosystems. My research focuses on robot hand dexterity, with an emphasis on developing novel deep learning methods. I am particularly interested in problems involving robotics and applied sciences, with prior work in nonlinear optimization, numerical methods, and computational physics.
Research Papers
3D Cal: An Open-Source Software Library for Calibrating Tactile Sensors
Rohan Kota, Kaival Shah, J. Edward Colgate, Gregory Reardon
Paper
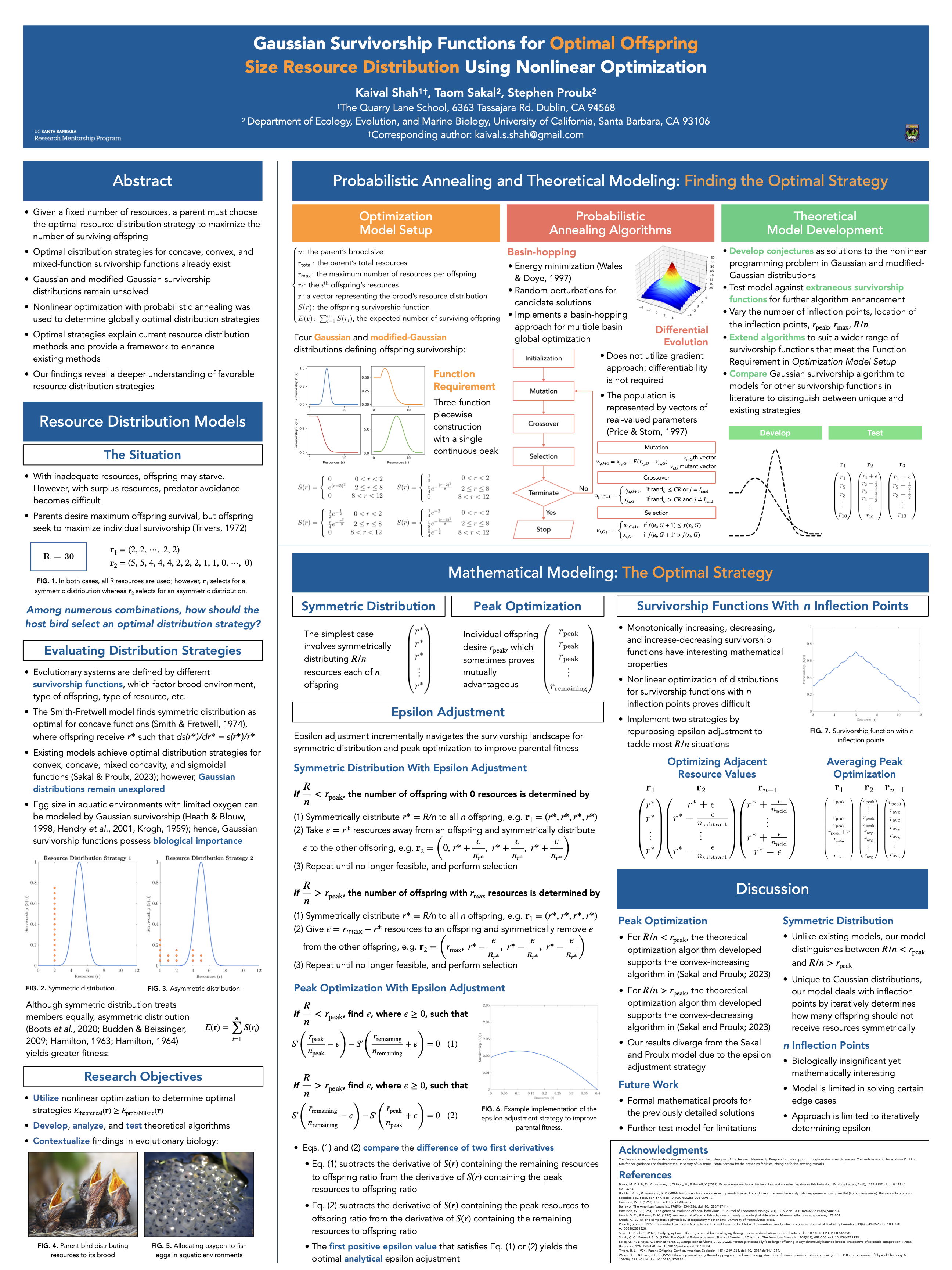
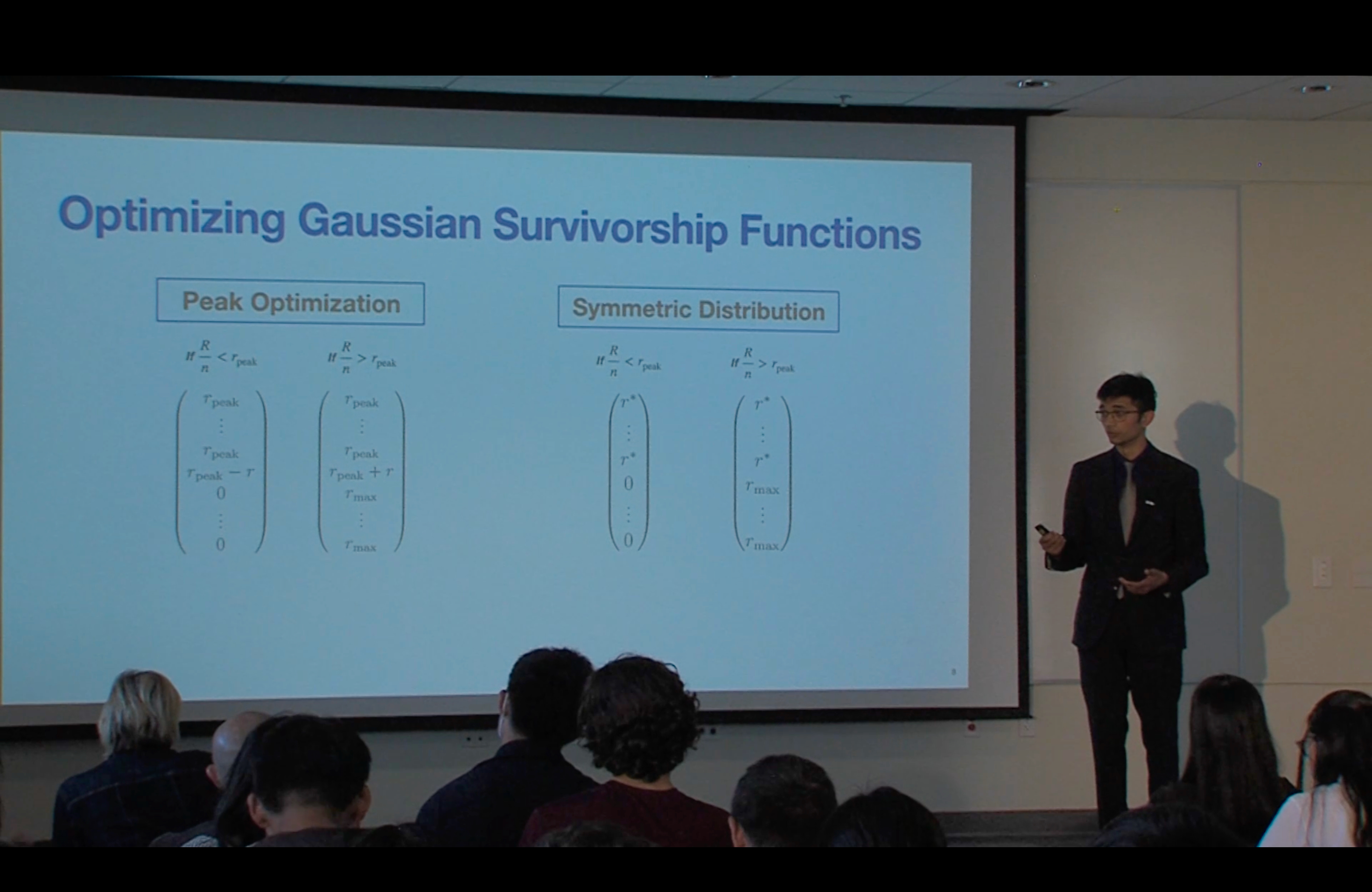
Gaussian Survivorship Functions for Optimal Offspring Size Resource Distribution Using Nonlinear Optimization
Kaival Shah, Taom Sakal, Stephen Proulx

Synchronization of Single and Double Pendulums With the Kuramoto Model for Real-World Applications
Kaival Shah
PaperResearch Experience
Center for Robotics and Biosystems, Northwestern University
Tactile Sensing and Dexterity Researcher, advised by PhD Candidate Rohan Kota and Postdoctoral Researcher Dr. Gregory Reardon
May 2025 – Present
Northwestern University Computer Science
Research Intern, advised by Zhenyu Pan
March 2025 – May 2025
Ecology Evolution and Marine Biology Lab, UC Santa Barbara
Mathematical Biology Researcher; advised by Dr. Taom Sakal
June 2023 – Aug. 2023
Oberlin College
Computational Physics Researcher; advised by New York University Professor of Physics Andrew Haas
June 2022 – Oct. 2022